











روبوت ثني الفرامل بالضغط: دليل عملي لأتمتة الانحناء الأذكى
أنظمة روبوت ثني الفرامل بالضغط أصبحت مسألة جادة للصانعين الذين يريدون إنتاجا أكبر دون إضافة المزيد من العمالة ببساطة, مساحة أرضية أكبر, أو زيادة ضغط الإنتاج. للعديد من الورش, لم يعد التحدي هو مجرد كيفية ثني الصفائح المعدنية بدقة. المشكلة الحقيقية هي كيفية الحفاظ على استقرار الجودة, تقصير وقت الاستجابة, وإدارة تكاليف التشغيل المتزايدة في الوقت نفسه.

لهذا السبب يحظى التحكم بالروبوت باهتمام أكبر في صناعة المعادن الحديثة. الخلية الروبوتية المتطابقة جيدا يمكن أن تساعد المصنع على زيادة التكرار, تحسين التعامل مع الأجزاء, والحفاظ على سير الإنتاج من خلال فترات أطول أو خارج أوقات الدوام. للمصنعين الذين يواجهون ضغوطا لتسليم المنتجات بشكل أسرع مع التحكم في الخردة والاعتماد على العمالة, هذا التحول مهم.
لماذا تبحث المزيد من المصانع at التحكم الآلي
في العديد من النباتات, سعة فرامل الضغط محدودة بتوفر المشغل, تنويعة الإعداد, صعوبة التعامل مع الأجزاء, والتعب أثناء الجري الطويل. حتى فرامل الضغط التقليدية القوية قد تواجه صعوبة في تقديم نفس النتيجة عندما تتضمن الأعمال انحناءات متكررة, الفراغات الأكبر, أو المطالبة بالتحكم في التسامح.
يساعد نظام الانحناء الآلي في معالجة هذه المشاكل من خلال دمج فرامل الضغط مع تحميل آلي, التموضع, الانحناء, وتسلسل التفريغ. بدلا من الاعتماد على إعادة التموضع يدويا لكل دورة, يتبع الروبوت مسارا مبرمجا ويكرره بثبات.
هذا يوفر العديد من الفوائد العملية:
• ثبات الانحناء عبر دفعة كاملة.
• يقلل التغير الناتج عن إرهاق المشغل.
• يتم إدارة الإنتاج المتكرر بشكل أفضل.
• تتحسن السلامة عند العمل مع المكونات الصغيرة أو الثقيلة.
• يتم تحسين استخدام العمالة عبر آلات أو عمليات مختلفة.
وهذا يعني أنه بالنسبة لمصنع متوسع, من الممكن زيادة الإنتاجية دون الحاجة لتوسيع المنشأة أو القوى العاملة.
ماذا a روبوت ثني الفرامل يفعل ذلك
روبوت ثني الفرامل الضغطية هو خلية عمل آلية للثني تدمج الروبوتات مع التحكم في مكابح الضغط CNC. يلتقط الروبوت الورقة أو الفارغة المكونة, يضعها في منطقة الأدوات, يدعم الجزء خلال كل خطوة انحناء, ثم تحركه أو تفريغه بعد اكتمال التشكيل.
الهيكل الدقيق يمكن أن يختلف. بعض الأنظمة تستخدم روبوتا مفصليا قياسيا مقترنا بفرامل ضغط.. وأخرى مصممة كخلايا أكثر تكاملا مع ممسكات مخصصة, منطق تتبع الورقة, الحماية الأمنية, ودعم البرمجة غير المتصلة بالإنترنت.
في الإنتاج العملي, الروبوت مسؤول عن الحركة القابلة للتكرار. توصل فرامل الضغط قوة التشكيل. معا, فهي تخلق عملية ثني أكثر تحكما, خاصة عندما تتكرر تسلسلات الأجزاء كثيرا.
عندما يكون الأتمتة الروبوتية منطقية
ليست كل وظيفة التحكم تحتاج إلى أتمتة. بعض أعمال النماذج الأولية منخفضة التردد لا تزال أفضل من الناحية اليدوية. لكن هناك حالات واضحة يصبح فيها التحكم الآلي جذابا للغاية.
1. الأعمال المتكررة ذات الحجم العالي
إذا كانت المهمة تعمل كثيرا وتتبع نفس تسلسل الانحناء, يمكن للأتمتة توفير الوقت وتقليل التنوع. بمجرد التحقق من البرنامج, يمكن للروبوت تكرار العملية مع انقطاع أقل بكثير.
2. تكرار الطلبات منخفضة الحجم
بعض الوظائف ليست ذات حجم كبير في دفعة واحدة, لكنهم يعودون بانتظام. في هذه الحالة, تجعل البرامج المحفوظة التحكم في الروبوتات مجديا لأن معرفة الإعداد لا تعتمد فقط على مشغل معين.
3. الأجزاء الثقيلة أو الصعبة
بعض أعمال الثني تتطلب ألواح كبيرة, الهندسة الصعبة, أو قطع يصعب التعامل معها يدويا. بمساعدة الروبوتات, يمكن للمصانع تحسين اتساق التعامل مع تخفيف العبء المادي على العمال.
4. الإنتاج الطويل خارج الوردية
للمصانع التي ترغب في زيادة الإنتاج خلال المساء أو ساعات الإشراف الأقل, يمكن للخلية الروبوتية أن تساعد في تمديد وقت الإنتاج بشكل أكثر فعالية.
الفوائد الرئيسية in ديلي فوريكيشن
قيمة التحكم الآلي ليست فقط في السرعة. في كثير من الحالات, الفائدة الأكبر هي التحكم في العمليات.
• تكرار أفضل
الروبوت لا يفقد تركيزه بعد دورات طويلة. يتبع مسار الحركة المبرمج, منطق القبض, وتسلسل الانحناء بنفس الإيقاع عبر الجري.. هذا يساعد في تقليل عدم الاتساق بين الأجزاء.
• تقليل خطر الخطأ البشري
الانحناء اليدوي يتطلب الحكم, التوقيت, التموضع, والتعامل الجسدي. حتى المشغلون ذوي الخبرة يمكنهم إحداث تغيير عندما يكون العمل متطلبا. النظام الروبوتي يقلل من هذه المتغيرات اليدوية.
• تحسين التحكم في التحمل
يساعد تحديد المواقع الثابتة للأجزاء على أداء فرامل الضغط بشكل أكثر موثوقية. عندما يقاس نظام الانحناء ويعوض تغير سمك المادة بشكل صحيح, تصبح العملية أكثر استقرارا.
إنتاجية أعلى من نفس المساحة
في كثير من الحالات, تستخدم الخلية الروبوتية تقريبا نفس مساحة الانحناء الأساسية مثل فرامل الضغط التقليدية مع توفير مخرج أكبر من خلال تنظيم أفضل للدورة.
التعامل مع الأجزاء بشكل أكثر أمانا
هذا مفيد بشكل خاص ل:
• الطلقات الفارغة الحادة
• أجزاء صغيرة بالقرب من منطقة الأدوات
• أوراق كبيرة يصعب دعمها يدويا
• الوظائف المتكررة التي تسبب إرهاقا للمشغلين مع مرور الوقت

الأنواع الشائعة oوأنظمة الانحناء الروبوتية
يمكن للمصانع اختيار طرق أتمتة مختلفة حسب نوع القطعة, الميزانية, وهيكل الإنتاج.
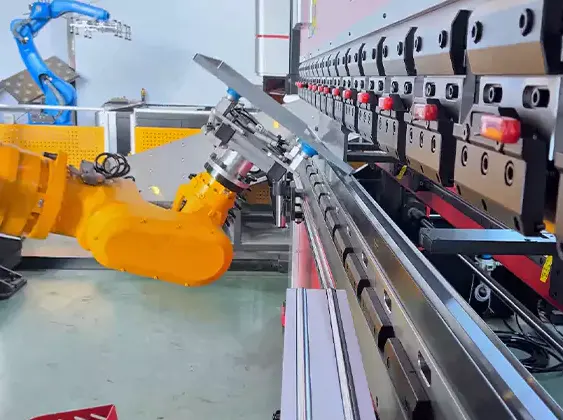
• خلايا الروبوت المفصلية
هذه من أكثر الخيارات شيوعا. توفر حركة مرنة ويمكنها دعم مجموعة واسعة من مهام الانحناء, خاصة عندما تختلف الأجزاء في الحجم أو الاتجاه.
• حلول الروبوتات التعاونية
يمكن أن تكون الكوبوتات مفيدة للتطبيقات الخفيفة حيث يكون النشر المرن والتفاعل الأبسط مهما. ليست الحل لكل مهمة ثني, لكنها تستطيع استيعاب بيئات إنتاج أصغر.
• خلايا فرامل روبوتية مدمجة
تم تصميم هذه الأنظمة منذ البداية كحزمة أتمتة موحدة. غالبا ما تبسط التنسيق بين الروبوت, منطقة الأدوات, ومنطق التعامل.
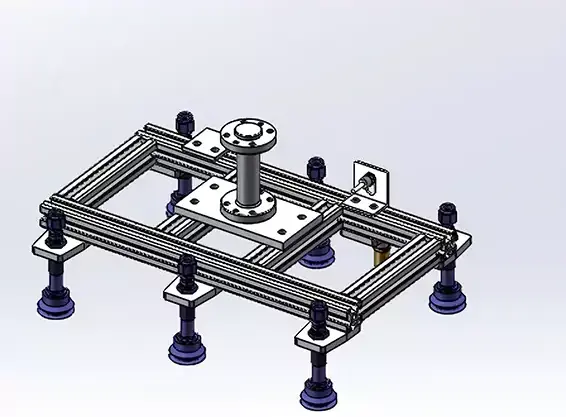
• روبوتات الانحناء المتخصصة
بعض الروبوتات مصممة خصيصا لمهام التحكم, تتميز بمؤثرات نهائية متخصصة واستراتيجيات مناولة تتناسب مع متطلبات معالجة الصفائح المعدنية.
في شبيبة راغوس, الاختيار الصحيح يعتمد أقل على لغة الاتجاه وأكثر على جزء من العائلة, تكرار التكرار, صعوبة التعامل, والعائد المتوقع على الاستثمار.

أسئلة to اسأل قبل أن تقوم بالأتمتة
قبل شراء نظام ثني روبوتي, يجب على الورشة أن تنظر بعناية إلى نمط الإنتاج الحقيقي.
اطرح هذه الأسئلة أولا:
• هل تتكرر المهام بشكل كاف لتبرير الجهد البرمجي?
• هل الأجزاء لها أبعاد مستقرة وسلوك مادي مستقر؟?
• قد يكون توفر العمالة يحد من الإنتاج بالفعل?
• هل هناك أي خسائر في الجودة بسبب عدم اتساق التحكم?
• يقوم بقياس حجم المكونات (ثقيل مقابل صغير) أي مخاوف تمني?
• هل يمكن للخلية استيعاب تدفق المواد الحقيقي للمصنع?
كل هذه الأسئلة ذات صلة لأن التحكم الآلي فعال, يجب تبسيط العمليات المحيطة. كما تتأثر النتيجة بالبيئة المنظمة المحيطة, أدوات الانحناء, اتجاه الجزء, طرق التحميل/التفريغ, وتصميم الطوابق.
إمكانيات الانحناء الآلي
حدود الأتمتة هي أيضا حدود الانحناء.
الخلية الروبوتية ليست الخيار الأفضل لكل نموذج أولي, كل هندسة فريدة, أو كل حالة من الأجزاء غير المستقرة. كما يتطلب برمجة دقيقة, إعداد أدوات موثوق, ومراقبة الإنتاج المنضبطة. إذا تم تركيب أداة بشكل خاطئ أو كان مرجع الجزء خاطئا, الروبوت لن يفعل ذلك "اكتشف الأمر" كما قد يفعل المشغل الماهر في العمل اليدوي.
لهذا السبب لا يزال التحكم الآلي يحتاج إلى إشراف على العمليات. الأتمتة الجيدة تقلل من التباين, لكن ذلك لا يلغي الحاجة إلى التخطيط التقني.
كيف يتغير الانحناء الآلي tالقوى العاملة
التحكم الآلي لا يبعد الأشخاص ببساطة عن العملية. في العديد من المصانع, يتغير مكان استخدام المهارة.
المزيد من الانتباه يتجه نحو:
• البرامج
• التحقق من الإعداد
• إدارة الأدوات
• الصيانة
• جدول الإنتاج
• الإشراف على الخلايا وتحسينها
يمكن أن يساعد هذا التحول المصنعين على بناء سير عمل أكثر تنظيما. بدلا من الاعتماد فقط على خبرة المشغل الفردية في الجهاز, يطور المصنع معيار عملية أكثر قابلية للنقل.
التوجه of الانحناء الذكي
مستقبل التحكم يتجه نحو تكامل أفضل, ليس فقط المزيد من حركة الآلات. البرمجة دون اتصال بالإنترنت, محاكاة, تعويض المواد, والبيانات الإنتاجية المتصلة أصبحت أكثر أهمية.
للمشترين من الخارج, أقوى جاذبية لروبوت ثني الفرامل المضغوطة بسيطة: يمكن أن يساعد المصنع على إنتاج أجزاء أكثر اتساقا مع كفاءة عمل أفضل وتحكم أقوى في العمل المتكرر.
ل JS RAGOS, هنا تصبح الأتمتة ذات قيمة. الهدف ليس أتمتة المظهر. الهدف هو تطبيق التحكم الآلي في الأماكن التي تحل مشاكل الإنتاج الحقيقية, يدعم جودة مستقرة, ويساعد الورشة على النمو بثقة أكبر.

